
GTMS User Interface
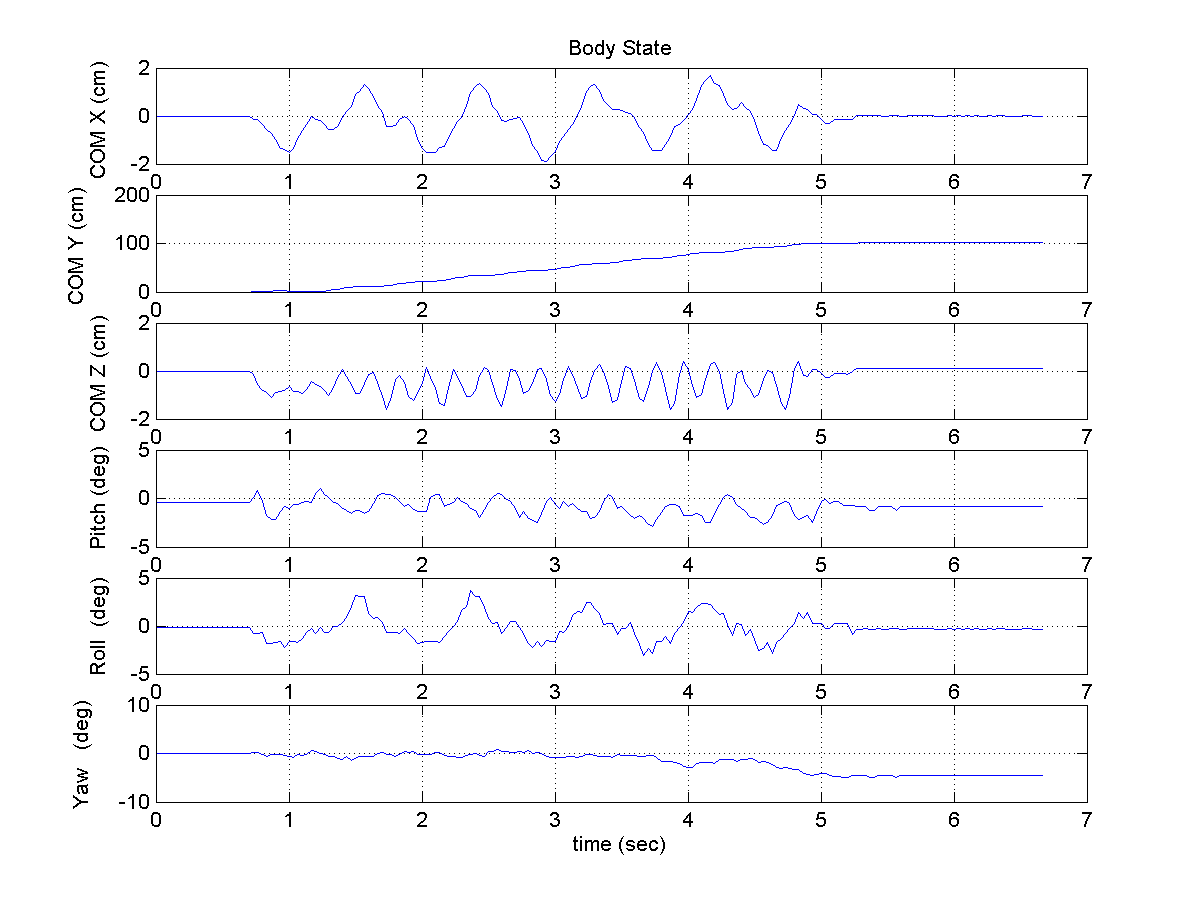
Reconstructed 6 DOF Motion
Welcome to the home page for GTMS, the ground truth measurement system.
GTMS, or ground truth measurement system, is a computer vision based optical tracking and motion capture software. The intended use for this software is to perform high-speed (quasi-real-time) position tracking of multiple targets with multiple cameras to generate three dimensional motion trajectories. These motion trajectories are used to measure the rotation, translation and deformation parameters of the object under study, and can be used for a variety of applications such as:
GTMS intends to be a complete solution, including Matlab(r) calibration calibration routines, a two-camera interface to the dt3155 frame grabbers on linux, simple and template based feature detection, support for multiple hypothesis tracking to handle spurious features and occlusions, as well as automatic correspondence selection and 3D reconstruction.
Version 1.0 of the tracking system was developed at the University of Michigan during 2001-2002, and is now being made available as open source. It is written in C and C++, with supporting camera calibration routines coded in Matlab(r). The only hardware support is for the dt3155 frame grabbers under Linux on i386, but GTMS also runs under windows when reading from files. Software dependencies are Intel(r) OpenCV library (project opencvlibrary on sourceforge), FLTK, lapack, and the linux DT3155 driver (project dt3155a on sourceforge).
Building and operating an optical motion tracking system requires a considerable investiment of time and effort. To assist you in gathering the necessary hardware that you will need, we invite you to look at GTMS in Action, a web page which describes the GTMS optical tracking system as it is used at the University of Michigan for performance analysis of the RHex hexipodal robot.
To obtain the GTMS software, please refer to our page on sourceforge.